
Colloquium
Assessing the geometric accuracy of a point cloud obtained with the RiCOPTER LiDAR-UAV for high precision rail-data and automatically vectorized rail-tracks from this point cloud
By Sjoerd Staats
Abstract
Drones, also known as Remotely Piloted Aircraft Systems (RPAS) or Unmanned Aerial Vehicles (UAV's), are a relatively new emerging technology within the Geodetic profession. UAV technologies are based on traditional accepted surveying methods such as photogrammetry and land surveying. Traditional data acquisition techniques, methods for data processing, and methods for testing results are not visible within the more or less black-box software developed for the UAV sector. Non-geodetic experts can handle basic workows implemented within these software packages to create 'nice looking' results while not aware of important basic geodetic principles.
By making use of these relatively new technologies, more data is acquired than possible with traditional single point determination techniques like tacheometry. This involves optimized and advanced computation methods to retrieve the desired data. Many accepted geodetic methods, such as the Delft Method for Testing and Quality Analysis, are based on the single point determination techniques. Object points are hereby measured from multiple tachometer setup locations to ensure correct and controllable data. All measurements are combined by making use of the Delft's adjustment theory. The object's coordinates and an estimation of their accuracy is the output. These methods are not suited for processing and checking the amount of data acquired with relatively new technologies such as laser scanning. Millions of points are recorded by a terrestrial or aerial laser scanner and merged into one point cloud. Usually, the point cloud consists of multiple scan locations (terrestrial laser scanning) or multiple ight lines (aerial laser scanning).
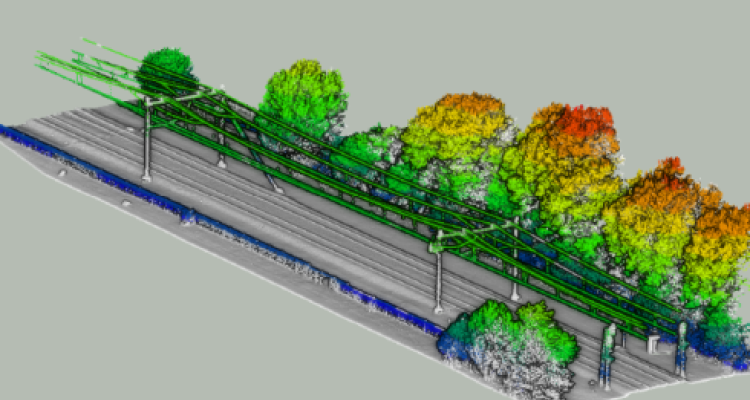
This research aimed to determine the accuracy of the Riegl RiCOPTER LiDAR UAV for measuring the location of railway corridors for Prorail with 1.5 cm accuracy. Theoretical background of the used system and it's components is necessary to understand what inuences the quality of a UAV derived point cloud. Important factors contributing to the accuracy are the use of GNSS in combination with an IMU, the choice of GNSS reference base-stations, coordinate systems, coordinate transformations, and processing options within the available software. The processing is performed within the software RiROCESS from Riegl and MMS POSPac from Applanix. Interpretation of the results focuses on possible causes for errors in the GNSS data, extraction of reference objects (such as plates, planes and spheres), and their interpretation regarding the accuracy. Possible scanning strategies and visual interpretations of the point cloud will provide an indication of available objects for automatic extraction of railway-features. Several scripts were created in combination with a PostgreSQL database during the research. The scripts provide center points of spheres and locations of reference GCP's from selected parts of the point clouds. he atness of planes is determined by using the open source software CloudCompare. A first step for automatic recognition of features in the point cloud is executed by applying a region growing algorithm. The point clouds are hereby split into three components: rails and ballast, overhead wires, and surrounding objects such as trees or buildings. GNSS base-station data from a local set-up base station provides less errors in comparison with 06-GPS data, based on extracted GCP locations. Coordinate transformations within the Riegl software were di_erent than the o_cial RDNAPTRANS2008 transformations integrated within the program PCTrans; provided by the Dutch Ministry of Defense. This is based on transformations of all GCP's from the WGS84 World coordinate system towards the RDNAP Dutch coordinate system in the software RiPROCESS and PCTrans. Sphere-centers and atness of planes can be modeled from the point cloud by using least squares _tting methods. The center points of at checkerboard GCP plates cannot be accurately determined to describe the absolute accuracy due to the scanner's principal of scan lines. The point cloud splitting methodology has already proven to compute, within seconds, where trees grow near overhead wires. This is done by extracting tree- and overhead-wire contours after which their overlap is computed.
In a follow-up study, the absolute accuracy of the reference points in the point cloud should be determined using the proposed methodology for extracting sphere centers. The actual location of the sphere center must be measured independently with accurate reference measurement.
Keywords: UALS; RIEGL RiCOPTER (VUX-SYS); accuracy; reliability; point cloud; GNSS